颠覆传统搬运模式 引领行业效率变革
社会发展到今天,有三大移动值得高度关注和具备深挖研发的潜力,第一是人的移动,第二是信息的移动,第三是物的移动。这三大移动的速度通过技术创新已经非常成功,并且越来越快,比如高铁、飞机等,还有更具深度价值的数字化工具,都发生了巨大改变,并推动着智慧物流的兴起。

作为智慧物流的积极创造者,浙江中力机械股份有限公司(以下简称:中力)经过五年时间的研发打磨,聚集资本、高端人才,特别是软件人才,成功进入了机器人搬运行业,借力数字化、智能化技术创造了全新升级的内部物流搬运模式。

回顾人类搬运的发展历程,经历了从手动到手动工具再到动力工具的过程,动力工具从110年前克拉克发明叉车以来,其基本架构并没有实质性的变化,中间的革新不过是机库或是柴油变成电动等的改良。但是聚焦到产品本质,并没有发生根本性变革,中力正是着力改变这一历史命题的引领者。
对于工业物流新时代的发展,何金辉董事长提出了自己的观点,“‘工业4.0’时代,工业世界由生产部和配套工业的物流部两大部分组成。但包括仓储、资金以及管理在内的工业物流成本几乎达到了生产总成本的30%。如果我们不能解决场内物流(即非道路场地内物流)问题,进一步提升到与工业生产水平相匹配的程度,显然会影响到工业生产效率。因此,制造物流在“工业4.0”时代新兴技术的加持下正迎来大发展的窗口期。这个窗口说的是改变赛道的关键技术,是推进电动化、智能化和数字化飞速发展的关键,是对传统物流搬运行业的变革和冲击,特别是一个全新的互联网搬运模式,它会带来革命性的改变。”
然而,制造企业面临三大棘手的现实问题。一是内部物流运行速度没有增加,虽然设备成本下降,但人工成本大幅度提高,货物搬运成本依旧偏高;二是安全性问题并没有得到真正解决,社会对叉车作业各方面的条件越来越苛刻;三是目前实际作业能效已经不能满足工业生产所需,货物的不到位使企业面临停产风险,直接影响生产效率。

机器人能解决所有的问题吗?
可以说,传统的物流模式已经不适合现在的工业模式,无人化服务变革势在必行。但人们急于求成的心态使得自己进入研发误区,试图用机器实现人所具备的专属能力。对此,何董表示:“任何设备都不可能完全代替人的柔性、高效和变通。如果我们开发的搬运机器人不能跟我们的模式相匹配,进而改变传统模式,我们就不可能实现无人搬运市场的发展,更不可能实现百年来观念意识的改变和变革。所以,我们推出的不是简单的产品,而是能够改变制造企业的物流模式。”

四个搬运动作

向智能搬运转型
中力推出产品+模式的物流搬运模式
")
五大模式重新定义了场内物流,切入、细分、改革到传统的物流制造模式中,让机器人和特种工人一样,分门别类的去解决传统的装、卸、移、堆四个专业搬运动作,并让机器人在一个领域或多个领域发展成为高端搬运“专家”。

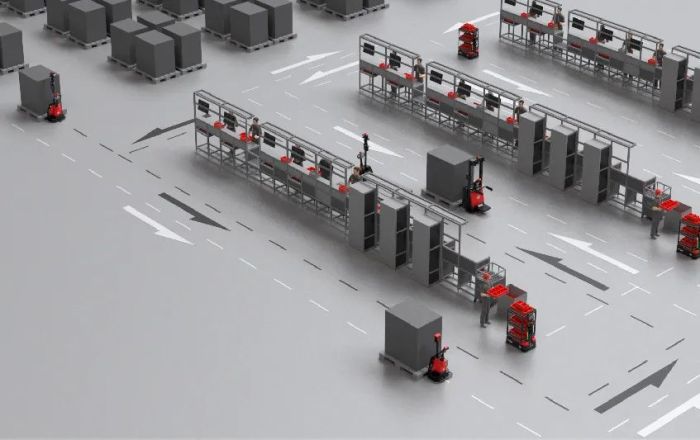
“环流”模式是以机器人为主体,通过环线循环运输的方式,解决场内同车间、跨车间、跨楼层的平面搬运问题。

环流模式的主角“智金刚”是中力跟合作伙伴潜心研发多年,基于视觉导航技术设计的一款极简、低成本的搬运机器人,把整个环流模式的主产品进行了颠覆式改变。也就是说,一台智金刚,加上一套智能软件,不需要重新布置庞大的复杂系统,也不需要高学历、懂技术的人才去操作使用。所有员工一键操作,随叫随停,低成本解决了人工效率问题。值得一提的是,即使机器人出现故障,操作人员也只需按下手柄,智金刚便可一秒切换至小金刚,使用手动操作继续工作。

环流模式智金刚
面对原料上线、成品入库的平面搬运场景,中力提出用“拉动”模式和“推动”模式来解决。

拉动模式——看板系统

推动模式
为此,由中力自主研发的空中相机加空位管理系统应运而生。将仓位的空满状态模拟成计算机里面的0/1模式,把货物搬运需求简单化。

拉动模式——空中相机识别库位空满状态
当空中相机感应到产线原料位置空缺之后,会通知相应的机器人到仓库里取货,搬运到生产线,此为“拉动”模式。

拉动模式——找到空位 自主卸货
当空中相机感应到成品下线位置有货后,会通知相应的机器人,把成品搬运到仓库,此为“推动”模式。即当任务的需求端为终点时发起的自动搬运为“拉动”模式,当任务的需求端为起点时发起的自动搬运为“推动”模式。

推动模式
当场内物流逐步趋于智能化后,传统的仓储模式无法适应于复杂物流需求,中力致力于将传统的集中货架仓库打散到各个车间,实现车间在仓库、仓库在车间的“分布式仓储”模式,最大程度减少了集中仓库搬运到各个分散产线的复杂物流需求,以实现库随线走,按需移动的仓储柔性。并以类似托盘的概念,生产设计了一批适合搬运和堆叠的标准载具,通过专用机器人可以实现载具的密集存储和多层堆叠,从而大幅提升仓储面积。机器人在承载货物的同时,可以识别其重量、尺寸及服务等信息,通过自身数字化的功能将分布式仓储变成柔性仓储,再通过人工智能、机器学习等技术,实现整体仓储物流效率的最大化,成本浪费的最低化。

分布式仓储模式
在一些厂区不可避免的要遇到室外装卸货车、室内外和跨厂房长距离转运,室内外的场景切换对机器人提出了更高的要求。中力专为“转运”模式开发了面向全天候、全天时、全工况、全场景的室内外高端搬运机器人。

转运模式
好风凭借力,送我上青云!对物流效率的变革,中力矢志不渝地坚持着自己的梦想!
谈及未来发展,何董表示:“我们希望打造出工业物流4.0平台,建立一个全新的物料管理系统,实现全部数字化,打通供应端和厂外物流数字化。一年来,中力不断思考、了解市场需求,不断尝试新概念、新模式和新产品的探索,只为今天能够打造出真正的场内物流自动化,用新模式再造物流行业的效率变革!”



















获取更多评论